产品认证:
生产厂家: 0
联系方式:
一、机器人减速器基本情况:
上世纪八十年代,日本帝人(纳博特斯克)公司成功的在摆线减速器的基础上创新、发明了RV摆线减速器,具有体积小、重量轻、传动比范围大、寿命长、精度稳定、效率高、传动平稳等一系列优点。RV摆线减速器上市后便迅速占领了工业机器人全球市场的60%。然而RV摆线减速器小型化后精度却达不到机器人的精度要求,故机器人小型减速器多使用谐波减速器。以六轴工业机器人为例:20kg以上均使用RV减速器,6kg~20kgRV减速器与谐波减速器各半,6kg以下全使用谐波减速器。目前高端谐波减速器被日本的另一家公司哈默纳科占据了全球市场的82%。
相对于RV摆线减速器来说,谐波减速器存在刚性较低, 传动比越小承载能力、传动效率和使用寿命越低,以及随着使用时间的增长,运动精度降低快等缺点。在机器人领域虽然RV减速器比谐波减速器具有显著的优点,但RV减速器小型化后传动精度却很难达到谐波减速器的精度,因此,RV减速器要全面取代谐波减速器必须攻克传动精度的难题。
二、走自主创新之路
发明人从2005年开始研究摆线针轮行星传动原理和结构,2011年进入机器人减速器的研究。提出了通过在精密传动中可将互成位置180°的两啮合付的相位相对旋转一个微小角度,可减少或消除传动间隙,以减小传动回差的方法。基于该方法,发明人在2012年申请的专利号为ZL2012 1 0039701.7<销孔输出可调隙少齿差行星传动装置> 获国家发明专利,且在此基础上新设计的《双向预紧调隙的零背隙摆线减速器》取得了重大突破,成功攻克RV减速器小型化传动精度的难题,现已申请了国家发明专利,专利号为202110645949.7。上述发明专利的小型样机已试制成功,经检测机构测试样机性能与RV减速器一样,具有承载能力大、传动精度稳定及刚性高、传动平稳、精度寿命长等优点,传动精度、刚度及寿命等主要性能指标均明显优于谐波减速器,易于高精度摆线减速器小型化,且制造难度、成本显著降低。其最大的优点是:可通过调隙达到全程无间隙传动(零背隙) ,传动精度超越高端谐波减速器。此外,RV减速器及大型摆线减速器也可用上述专利方法实现微间隙或无间隙传动。
与同型号的谐波减速器比较优势在于:
该减速器发明专利除机器人领域外,还能在数控机床、医疗器械、航空航天等高端设备领域得到广泛应用。
发明人简介:
周晓汀,男,1940年生,机械专业本科毕业,享受国务院特殊津贴的高级工程师,退休前曾任贵州省机械工程学会理事,中国机械工程学会高级会员,贵州省发明协会会员。曾获国家专利6项、省地科技成果多项、在国家及省级学术刊物曾发表论文5篇。上世纪七、八十年代开始从事机械传动研究,发表了《差动行星减速器》、《谐波链传动》论文,退休后开始摆线行星传动研究,2006年参加重庆大学举办的机械传动国际学术会发表相关学术论文。2008年《内摆线针轮行星传动》获发明专利授权, 2010年与航天科工集团35所合作试制微型精密雷达减速器取得成功。2011年转入机器人减速器的研制工作。2017年《销孔输出可调隙少齿差行星传动装置》获发明专利授权。联系电话:15185100149(贵阳)、13527727732(广州)13601371798(北京) E-mail:zhouxiaot ingzmz@163.com.
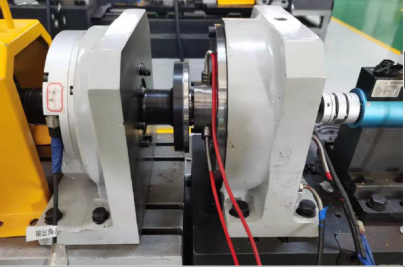
国家自动化检测中心测试台
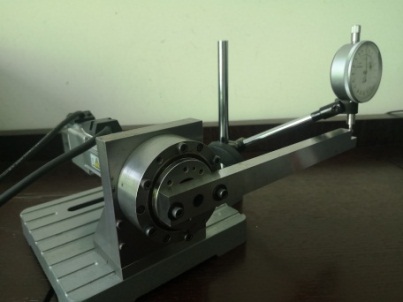
重复定位精度测试装置

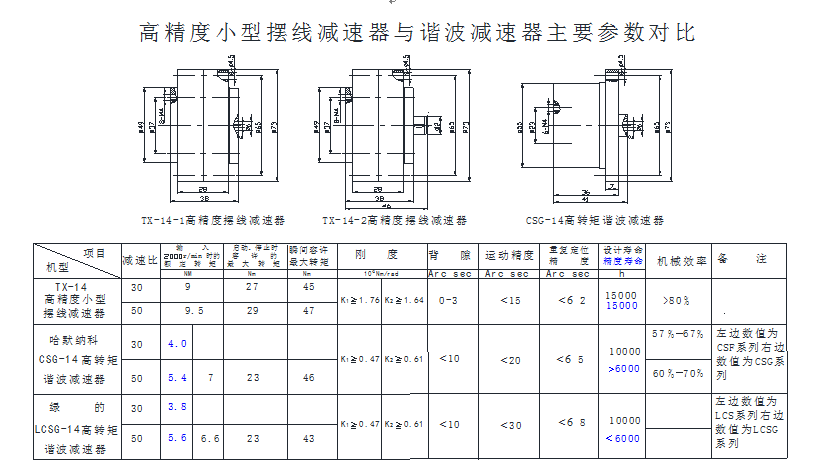
高精度小型摆线减速器
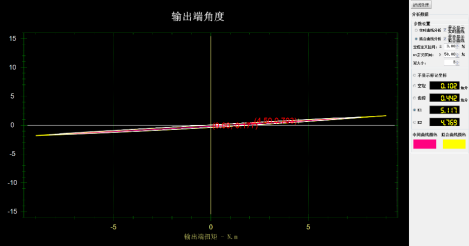
扭转刚度图
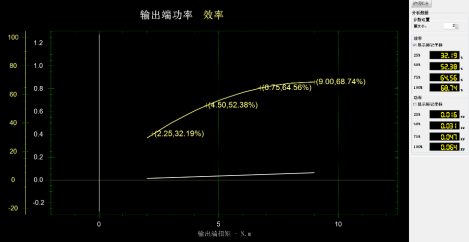
传动效率图
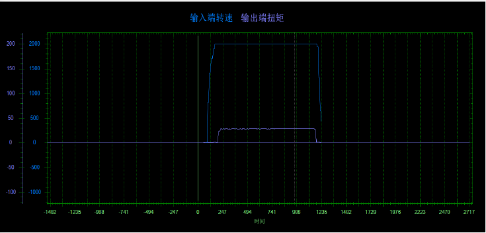
超载实验图
TX-14高精度摆线减速器样机传动比30检测数据与谐波减速器国标对比
|
项目
类型 |
额定扭矩(NM) |
超载扭矩(NM) |
扭转刚度 (104 Nm/rad) |
传动效率 |
空程 (弧分) |
背 隙 (弧秒) |
传动误差 (弧秒) |
重复定位 精度 (弧秒) |
|
TX-14小型高精度摆线减速器 |
9 |
36 |
K1=1.76 K2=1.64 |
68.74% |
0.102 |
0.921 |
|
<±2 |
|
CS-14谐波减速器 减速比30 |
3.2 |
14 |
K1≧0.47 K2≧0.61 |
----- |
1级精度 ≤1 |
1级精度 ≤10 |
1级精度 ≤30 |
----- |
注:红色数据为国家自动化装备质量检验检测中心检测数据,绿色数据为专用重复定位精度测试装置检测数据.
<传动误差> 因国家自动化装备质量检测中心测试台模型设计程序与该减速器不匹配,数据误差太大,已送中机生产力促进中心测试研究所设计专用设备测量该指标。
<传动效率>因国家自动化装备质量检测中心测试台的最小测试扭矩远大于该减速器额定扭矩也存在一定误差未达到设计指标。也将在中机生产力促进中心测试研究所进行重测。

 产品与技术
产品与技术 您现在的位置:
您现在的位置: